Textile taxonomy and classification using pulling and twisting
Alberta Longhini, Michael C Welle, Ioanna Mitsioni, and 1 more author
In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
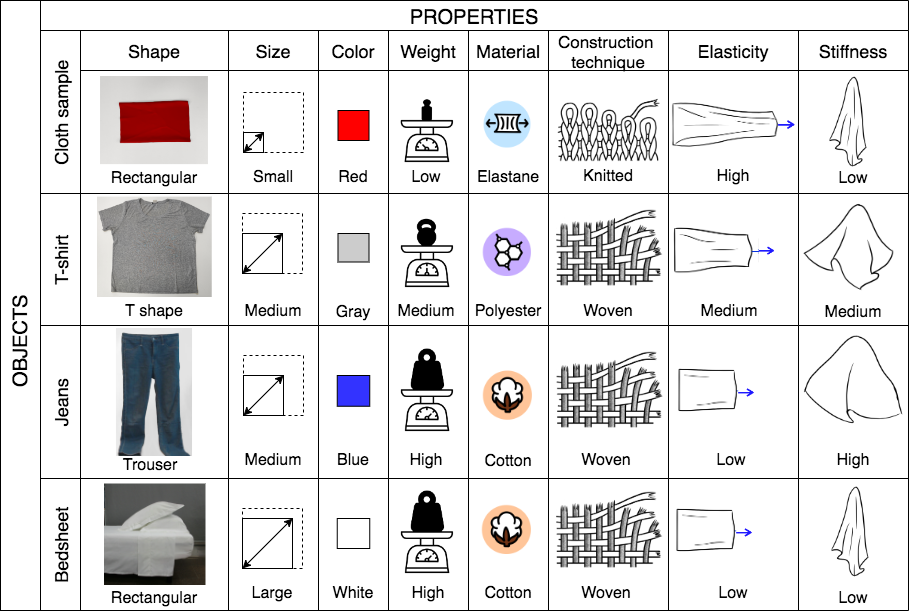
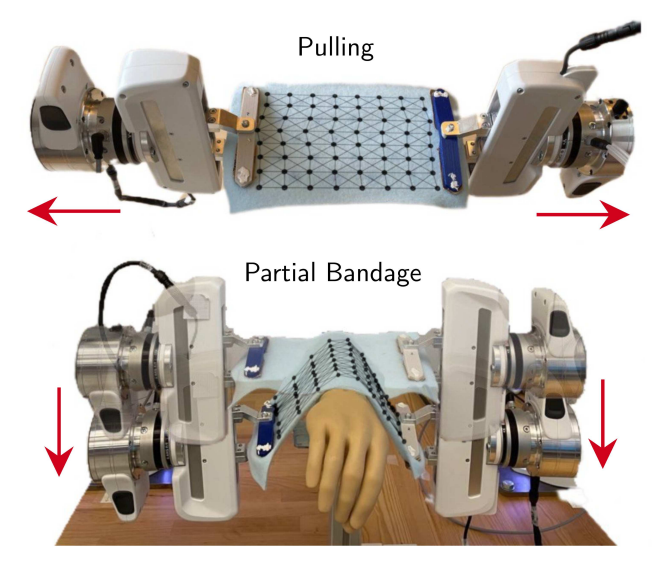
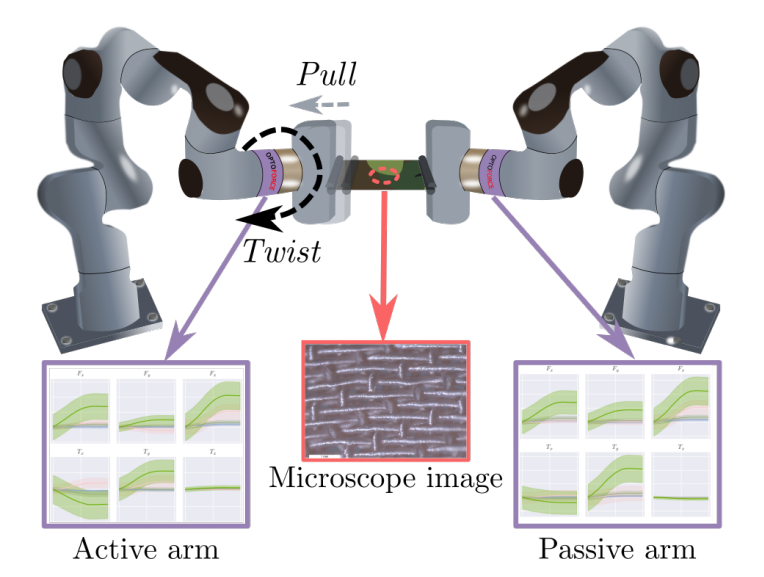
Identification of textile properties is an important milestone toward advanced robotic manipulation tasks that consider interaction with clothing items such as assisted dressing, laundry folding, automated sewing, textile recycling and reusing. Despite the abundance of work considering this class of deformable objects, many open problems remain. These relate to the choice and modelling of the sensory feedback as well as the control and planning of the interaction and manipulation strategies. Most importantly, there is no structured approach for studying and assessing different approaches that may bridge the gap between the robotics community and textile production industry. To this end, we outline a textile taxonomy considering fiber types and production methods, commonly used in textile industry. We devise datasets according to the taxonomy, and study how robotic actions, such as pulling and twisting of the textile samples, can be used for the classification. We also provide important insights from the perspective of visualization and interpretability of the gathered data.